Technische Grundlagen zu Schwingungstilgern
Schwingungstilger bzw. Schwingungsdämpfer werden zur Reduzierung von nieder- und hochfrequenten Schwingungen in Maschinen, Anlagen und Bauwerken eingesetzt.
In Windenergieanlagen zum Beispiel werden Schalltilger mit bis zu 500 kg gegen Störungen im Frequenzbereich 20 Hz bis 600 Hz eingesetzt. Auf der anderen Seite verwendet man Pendeltilger mit bis zu 15 t, um Biegeschwingungen von Türmen bei 0,15 Hz bis 1,5 Hz zu beruhigen. Torsionsschwingungen in rotierenden Maschinen wie Getriebe, Pumpen und Generatoren erfordern Torsionstilger, die Drehschwingungen im Triebstrang verhindern. Die genannten Beispiele beruhen auf demselben Tilgerprinzip.
Die genannten Schwingungstilger werden auch als passive Schwingungsdämpfer bezeichnet, da sie im Gegensatz zu adaptiven und aktiven Systemen ohne Energieversorgung auskommen.
Das Prinzip eines passiven Schwingungstilgers
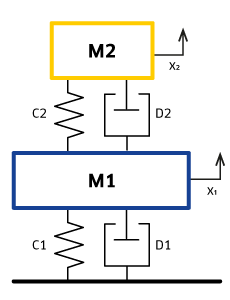
Ein Schwingungstilger ist ein gedämpftes Masse-Feder-System (siehe Abb. 2), das an die zu beruhigende Struktur angebracht wird. Die sechs möglichen Bewegungsrichtungen der Masse können dabei über Federn und Dämpfer so abgestimmt werden, dass die Masse gleichzeitig in mehrere Richtungen und Frequenzen Schwingungen reduziert.
© ESM GmbH
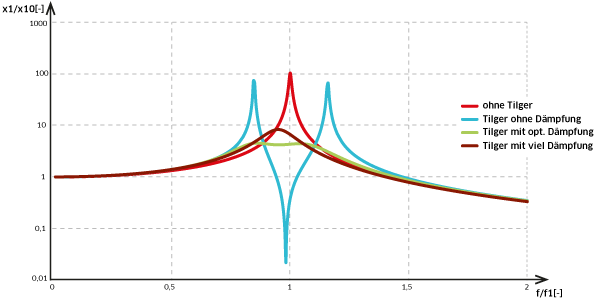
Abb. 1: Auswirkungen eines passiven Schwingungstilgers auf ein Feder-Masse-System
© ESM GmbH
Abb. 2: Feder-Masse-System von passiven Schwingungstilgern
Das Verhalten eines Schwingungstilgers kann mit einem Zwei-Massen-Schwinger-Modell (siehe Abb. 2) einfach veranschaulicht werden. Die schematische Darstellung (Abb.1) zeigt die berechnete Bewegung der Hautpmasse (M1) über der Anregungsfrequenz für verschiedene Parameter des Schwingungstilgers (M2). Je nach Fall sind Schwingungsreduzierung von mehreren Größenordnungen möglich. Für den Fall niedriger Dämpfung D2 (blaue Linie im Diagramm, Abb. 1) wird zwar die störende Eigenfrequenz des Hauptsystems eliminiert, es entstehen aber zwei neue Störfrequenzen, die ein ähnliches Schwingungsniveau aufweisen wie die ursprüngliche Störung. Erhöht man nun die Dämpfung D2 des Schwingungstilgers kann ein Optimum (grüne Linie im Diagramm, Abb. 1) erreicht werden, bei dem die Störung in einem breiten Frequenzbereich stark gedämpft wird. Durch Erhöhung der Masse bzw. der Federsteifigkeit können diese Kurven weiter reduziert bzw. verschoben werden.
Das Prinzip des passiven Schwingungstilgers funktioniert für Schwingungen beliebiger Frequenzen. So hat ESM passive Tilger für Frequenzen von ca. 0,15 Hz bis ca. 600 Hz im Programm. Die Bewegungsrichtungen reichen von 1D-Rollbewegungen gegen Biegeschwingungen in Türmen, über einstellbare Schalltilger in alle translatorischen Richtungen der Tilgermasse, bis hin zu Torsionstilgern gegen Dreheigenschwingungen.
Eigenschaften eines adaptiven Schwingungstilgers
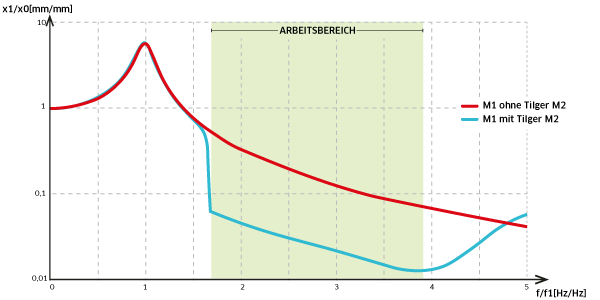
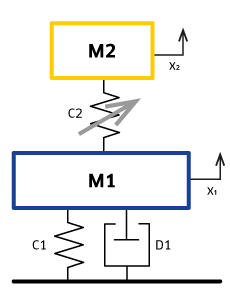
Durch Regelung und Aktorik können adaptive Schwingungstilger (Abb. 3 und Abb. 4) die Feder- oder Dämpfungseigenschaften ändern, um für bestimmte Betriebssituation optimal eingestellt zu sein. Ändert man beispielsweise die Federsteifigkeit des Schwingungstilgers gemäß eines Eingangssignals (z. B. Drehzahl oder Fahrweg einer Maschine), kann man die Tilgerwirkung auf einen wesentlich größeren Bereich ausweiten. Die große Wirkung des niedrig gedämpften Schwingungstilgers kann man beispielsweise so anpassen, dass er immer optimal gegen eine Anregungsfrequenz arbeitet. Bei Turmtilgern lässt sich mit der Anpassung der Dämpfung auf bestimmte Betriebszustände eine bessere Wirkung des Tilgers erzielen.
© ESM GmbH
Abb. 3: Auswirkungen eines adaptiven Schwingungstilgers auf ein Feder-Masse-System
© ESM GmbH
Abb. 4: Feder-Masse-System von adaptiven Schwingungstilgern
Aktive Schwingungstilger
Bei aktiven Tilgern handelt es sich um Systeme, die mit elektromagnetischen oder elektrodynamischen Aktoren bzw. Unwuchtmotoren gezielt Gegenkräfte in ein System einleiten um es zu beruhigen. Dabei muss die Gegenkraft in Richtung, Frequenz, Phase und Amplitude genau auf die Anregungskräfte abgestimmt sein. Setzt man aktive Tilger gegen starke Anregungskräfte ein, müssen Leistungselektronik, Regelung und Sensorik genau aufeinander abgestimmt sein.
Vorteilhaft bei aktiven Schwingungstilgern ist, dass sie weniger Masse haben als andere Schwingungstilger, allerdings haben sie einen hohen Energiebedarf und verlieren bei Stromausfall vollständig ihre Wirkung.